|
 |
 |
 |
|
Daily
At-Sea Logs |
| Thursday,
May 13, 2004 This
morning was the first morning since boarding the Nancy Foster that
the research group did not meet as a team. Instead, Greg has posted
the day’s Today’s survey plan includes motoring along a series of transects through the sanctuary to collect acoustic data using Dr. Daniela Di Iorio's transducer. This instrument records acoustic data using single beam sonar and enables scientists to detect how far away an object is, as well as its size. This instrument is frequently used to research marine ecosystems because it is non-obtrusive, meaning that it does not affect the fish that it is observing. Additionally, the transducer is quite efficient because it collects large amounts of data in a short period of time. While this instrument is very useful in these kinds of studies, it also has its limitations. Transducers cannot distinguish between one species and another, therefore other instruments like the ROV tapes, video logs, and traps are needed to supplement the data it collects. Another limitation of the instrument is the amount of time needed to process the enormous amounts of data. Still another limitation, and the main problem we have encountered while using the transducer on the Nancy Foster, relates to its calibration process. In order for the instrument to collect data accurately, it needs to be calibrated like most scientific instruments. Unfortunately, the shear size of its frame and its position on the boat makes calibration very difficult. The transducer is mounted to a large piece of pipe that hangs perpendicular to the ocean’s surface off the starboard (right) side of the ship. In order to calibrate the instrument, a small metal sphere (about the size of a golf ball) must be placed directly underneath the transducer pole, which is nearly 25 feet long. To make matters more complicated, much of the pipe is under water and so we have to lower the sphere into the water near the pipe and attempt to position it directly under the transducer. Since there was a strong current pulling the sphere under the ship rather than toward the transducer, calibration has been unsuccessful. Next, we attempted to calibrate the transducer by attaching the sphere to three lines so that it can be controlled in three directions. Unfortunately, this method did not work either. We had no choice but to put Plan C into action - allow the instrument to collect the data without calibrating it. This plan is not ideal because the data collected by the transducer will not be an accurate reflection of the distance and size of the fish it detects. As a result, Daniela must calibrate the transducer later and recalculate its data to reflect the true values.
Dave and Greg conducted three transects similar to the ones completed yesterday. Shortly after their return, the ROV was deployed. Unfortunately, it was pulled under the ship and became tangled in the hydrophone’s wires located on the same side as the J-Frame. Glenn, the ROV technician, gained control of the ROV and quickly steered the instrument free from the boat and wires.
Before I close, I must tell you that hammerhead sharks were spotted swimming around the boat this evening after dinner. Everyone was excited because many have never seen a hammerhead in the wild until today. Seeing these animals in their natural habitats is a remarkable sight. I only wish you could be here to share these unique experiences with us. Well, it has been another incredible day aboard the Nancy Foster. Please visit again tomorrow for our next adventure. Good
evening,
|
|||||||||
 schedule
regarding the deployment of each instrument in the Dry Lab. (The Dry
Lab is like the boat’s office where all of the computers are
kept.) By this point of the survey, everyone has a clearer understanding
the plan of action for the day and their responsibilities; so instead
of meeting we reviewed the video from yesterday’s ROV deployment.(picture
on right) It is really neat to see all of the soft coral, sponges,
crabs, and fish that live on the ocean floor beneath us. What a great
way to start off the day!
schedule
regarding the deployment of each instrument in the Dry Lab. (The Dry
Lab is like the boat’s office where all of the computers are
kept.) By this point of the survey, everyone has a clearer understanding
the plan of action for the day and their responsibilities; so instead
of meeting we reviewed the video from yesterday’s ROV deployment.(picture
on right) It is really neat to see all of the soft coral, sponges,
crabs, and fish that live on the ocean floor beneath us. What a great
way to start off the day! Dr.
Di Iorio also deployed another instrument, Acrobat CTD, for the first
time since boarding the ship. (picture
on left)This instrument measures conductivity (salinity), temperature,
and depth of the water column as it is towed. Unlike the CTD's I’ve
seen in the past, this CTD is towed by the ship for nearly four hours.
This instrument has a winged structure that allows it to glide up
and down through the water column, resembling the soaring motion of
a bird in fight. Therefore, as the Acrobat moves through the water
for nearly four hours at a time, it collects a wide range of profiles.
Dr.
Di Iorio also deployed another instrument, Acrobat CTD, for the first
time since boarding the ship. (picture
on left)This instrument measures conductivity (salinity), temperature,
and depth of the water column as it is towed. Unlike the CTD's I’ve
seen in the past, this CTD is towed by the ship for nearly four hours.
This instrument has a winged structure that allows it to glide up
and down through the water column, resembling the soaring motion of
a bird in fight. Therefore, as the Acrobat moves through the water
for nearly four hours at a time, it collects a wide range of profiles.
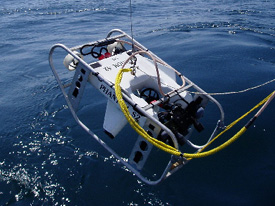 It
is now 1900 hours and we are attempting to deploy the ROV again. (picture
on right) ROV's are useful because they capture live visual
imagery of the ocean floor.As the name implies, scientists are able
to control the movement of the instrument remotely from the Wet Lab
where the monitor is located. The ROV enables scientists to see the
world below and have control of their position, which allow them to
follow a fish or explore the habitat in a general way. When the data
from the ROV are coupled with additional data from other instruments,
our understanding of the habitats and their occupants increases due
to the multiple perspectives that the equipment offers.
It
is now 1900 hours and we are attempting to deploy the ROV again. (picture
on right) ROV's are useful because they capture live visual
imagery of the ocean floor.As the name implies, scientists are able
to control the movement of the instrument remotely from the Wet Lab
where the monitor is located. The ROV enables scientists to see the
world below and have control of their position, which allow them to
follow a fish or explore the habitat in a general way. When the data
from the ROV are coupled with additional data from other instruments,
our understanding of the habitats and their occupants increases due
to the multiple perspectives that the equipment offers.